# 3.1 K-近邻算法介绍
K Nearest Neighbor算法又叫KNN算法,这个算法是机器学习里面一个比较经典且容易理解的分类算法。
1968年由 Cover 和 Hart 提出,应用场景有字符识别、文本分类、图像识别等领域。
该算法的思想是:一个样本与数据集中的k个样本最相似,如果这k个样本中的大多数属于某一个类别.
# 3.1.1 KNN概念
- Knn定义
单/多维空间中,在一个样本的位置周围,获取k个样本,统计k个样本大部分所属类别,那这个样本也属于这个类别。
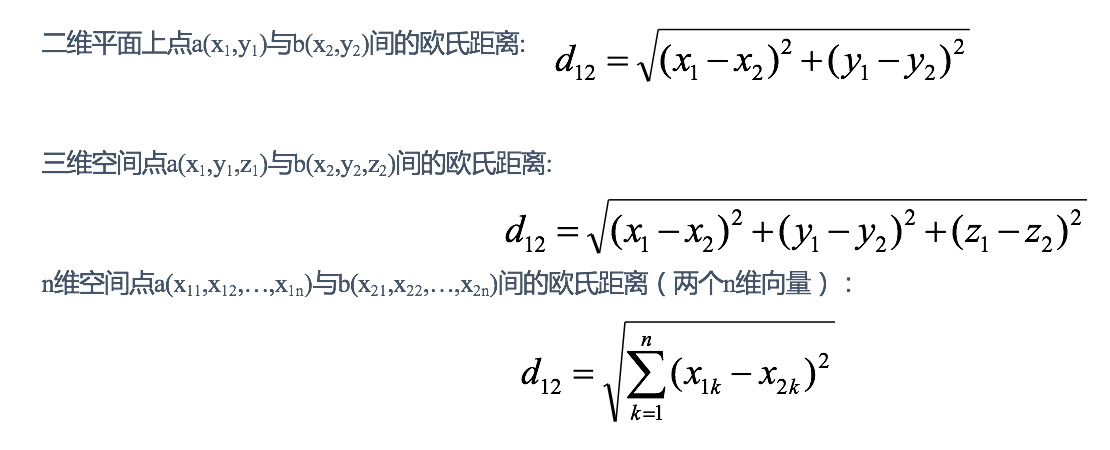
- 距离公式
获取两个样本的距离可以通过以下公式计算,又叫欧式距离。对于高维特征,曼哈顿距离(即p更低)更能避免维度灾难的影响,效果更优。欧几里得距离(次数更高)更能关注大差异较大的特征的情况
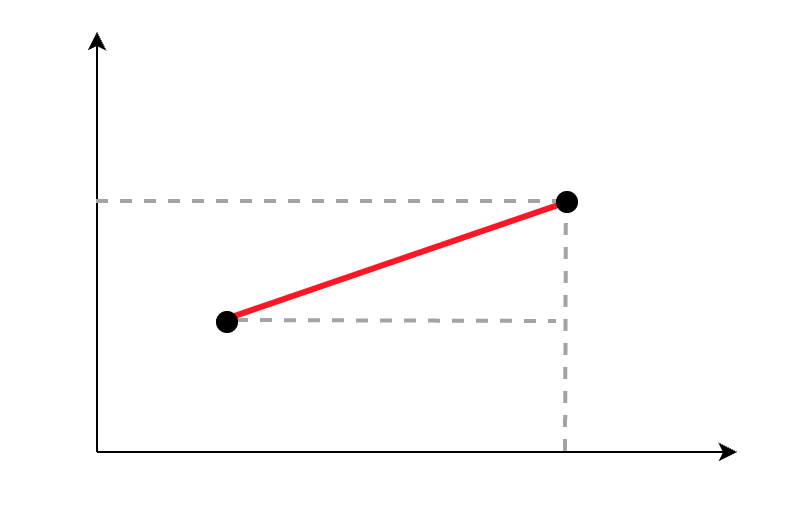 在二维空间下,计算两点之间距离,做辅助线,形成直角三角形,用公式计算斜边长度。
在二维空间下,计算两点之间距离,做辅助线,形成直角三角形,用公式计算斜边长度。
三维我目前不会画,直接上计算公式吧
# 3.1.2 电影类型分析
我们现在有一组电影数据

我们对ID为9的数据进行预测电影类型,可以使用K近邻的思想
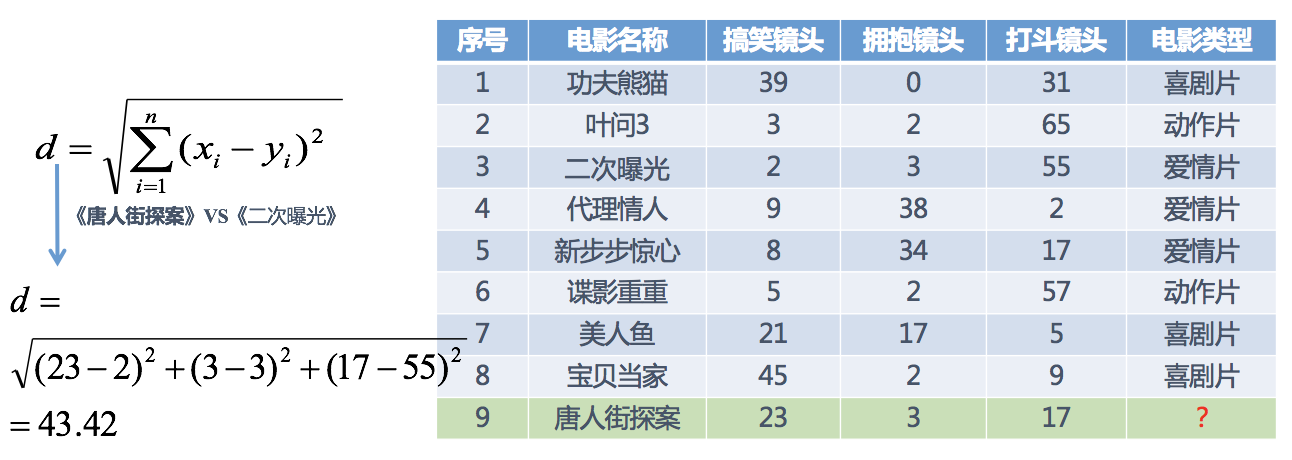
分别计算每个电影与ID为9的距离,然后求解
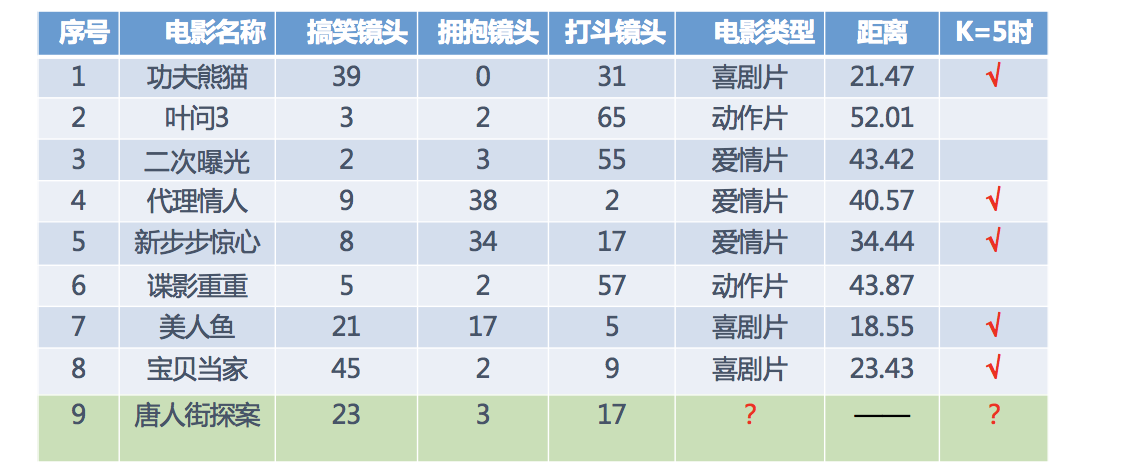
取最近五个值的时候,喜剧片3、爱情片2,喜剧片较多,所以预测ID为9的电影是喜剧片
# 3.1.3 K近邻算法API
# 1. 构建参数介绍
sklearn.neighbors.KNeighborsClassifier(n_neighbors=5,algorithm='auto')
- n_neighbors:int,可选(默认= 5),k_neighbors查询默认使用的邻居数
- algorithm:{‘auto’,‘ball_tree’,‘kd_tree’,‘brute’}
- auto,快速k近邻搜索算法,默认参数为auto,可以理解为算法自己决定合适的搜索算法。除此之外,用户也可以自己指定搜索算法ball_tree、kd_tree、brute方法进行搜索,
- brute,暴力搜索,也就是线性扫描,当训练集很大时,计算非常耗时。
- kd_tree,构造kd树存储数据以便对其进行快速检索的树形数据结构,kd树也就是数据结构中的二叉树。以中值切分构造的树,每个结点是一个超矩形,在维数小于20时效率高。
- ball tree是为了克服kd树高维失效而发明的,其构造过程是以质心C和半径r分割样本空间,每个节点是一个超球体。
# 2. 代码过程
# 1. 导入依赖
from sklearn.neighbors import KNeighborsClassifier
# 2. 数据集
x = [[0], [1], [2], [3]]
y = [0, 0, 1, 1]
x为特征数据,y为目标值
# 3. 模型训练
# 实例化API
model = KNeighborsClassifier(n_neighbors=2)
# 使用fit方法进行训练
model.fit(x, y)
model.predict([[1]])
# 3.1.4 K值选择
# 1. k值的问题
我们在电影类型预测的时候,选择k=5,那么这个值应该怎么选择呢?
选择k值有两个问题
- k值过小
容易受到异常点影响,被少概率/异常数据误判
- k值过大
受到样本均衡问题,容易与距离较远不相关的数据关联,从而导致结果不准确
在实际应用中,K值一般取一个比较小的数值,例如采用交叉验证法(简单来说,就是把训练数据在分成两组:训练集和验证集)来选择最优的K值。对这个简单的分类器进行泛化,用核方法把这个线性模型扩展到非线性的情况,具体方法是把低维数据集映射到高维特征空间。
# 2. 交叉验证,网格搜索
# 1. 什么是交叉验证
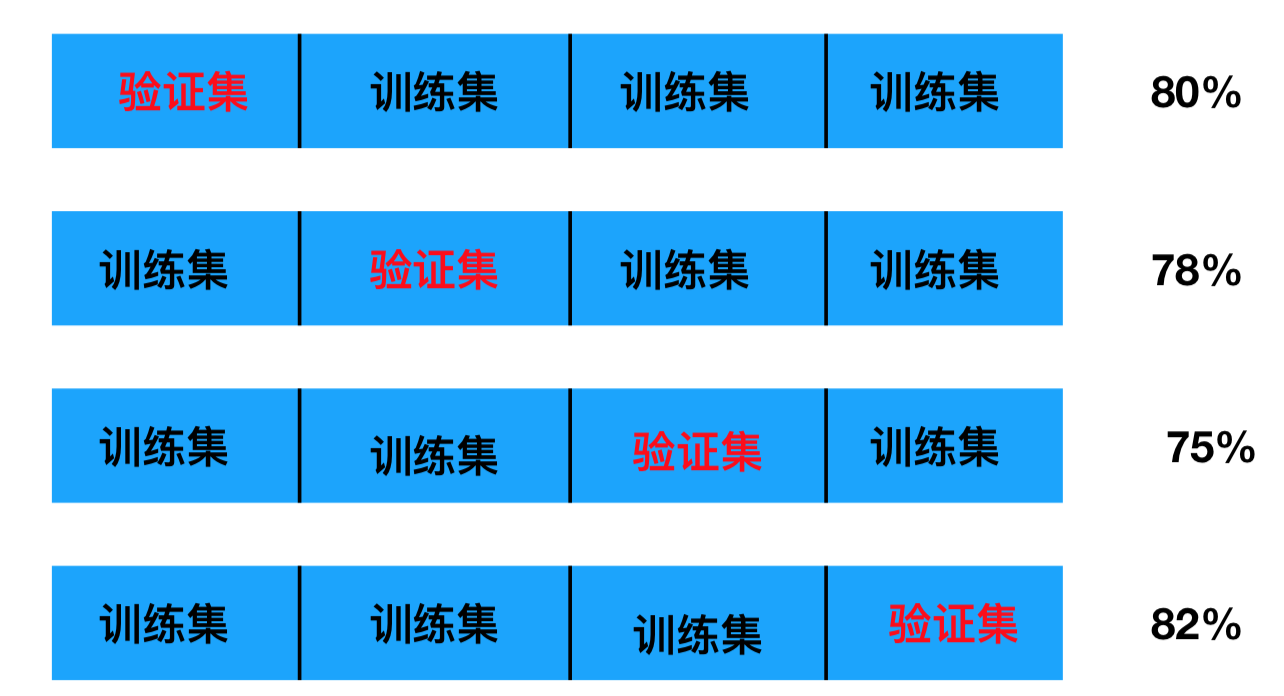
将训练数据,分为训练集和验证集。将数据分成4份,其中一份作为验证集。然后经过4次(组)的测试,每次都更换不同的验证集。得到4组模型的结果,取平均值作为最终结果。又称4折交叉验证。
- 训练集:训练集+验证集
- 测试集:测试集
如下图所示:
# 2. 为什么需要交叉验证
交叉验证目的是为了让被评估的模型更加准确可信,因为偶然概率很大。
# 3. 什么是网格搜索
通常情况下,有很多参数是需要手动指定的(如k-近邻算法中的K值),这种叫超参数。但是手动过程繁杂,所以需要对模型预设几种超参数组合。每组超参数都采用交叉验证来进行评估。最后选出最优参数组合建立模型。让手动挡变成自动挡。

# 4. 网格搜索API
- sklearn.model_selection.GridSearchCV(estimator, param_grid=None,cv=None)
- 对估计器的指定参数值进行详尽搜索
- estimator:估计器对象
- param_grid:估计器参数(dict){“n_neighbors”:[1,3,5]}
- cv:指定几折交叉验证
- fit:输入训练数据
- score:准确率
- 结果分析:
- bestscore__:在交叉验证中验证的最好结果
- bestestimator:最好的参数模型
- cvresults:每次交叉验证后的验证集准确率结果和训练集准确率结果
代码如下:
param_grid = {'n_neighbors': range(1,10)}
estimator = GridSearchCV(model, param_grid=param_grid, cv=5, verbose=0)
estimator.fit(x_train, y_train)
print('最优参数组合:', estimator.best_params_, '最好得分:', estimator.best_score_)
print('测试集准确率:', estimator.score(x_test, y_test))
# 3.1.5 误差
误差是指测量值与真实值之间的差距,误差的大小反映了实验、观察、测量和近似计算等所得结果的精确程度。误差的绝对值越小,精确程度越高。
近似误差:对现有训练集的训练误差,关注训练集,如果近似误差过小可能会出现过拟合的现象,对现有的训练集能有很好的预测,但是对未知的测试样本将会出现较大偏差的预测。模型本身不是最接近最佳模型。
估计误差:对测试集的测试误差,关注测试集,估计误差小说明对未知数据的预测能力好,模型本身最接近最佳模型。
# 3.1.6 KD树
实现knn时,主要是如何对训练数据进行快速搜索,快速找到周围的样本做统计预测。
如果在海量的训练数据,且维数较大时,高效率的搜索尤其必要。
K近邻简单的实现就是通过线性扫描(穷举搜索),和每一个训练数据的距离做计算,计算后再查找k近邻。数据集很大时,计算非常耗时。
为了提高KNN搜索效率,从而使用KD树结构存储训练数据,减少计算距离次数,实现高效搜索。
# 1. 什么是KD树
线性扫描时,计算成本非常高,针对N个样本,D个特征的数据集,其算法复杂度为O(DN^2)。
kd树为了避免全部计算,算法会把距离信息存储在一个树里,计算之前先从树里查询距离信息,尽量避免重新计算。其基本原理是,如果A和B距离很远,B和C距离很近,那么A和C的距离也很远。有了这个信息,就可以在合适的时候跳过距离远的点。
这样优化后的算法复杂度可降低到O(DNlog(N))。
# 2. KD树原理
先看二叉树结构,通过构建二叉树,使检索速度提升
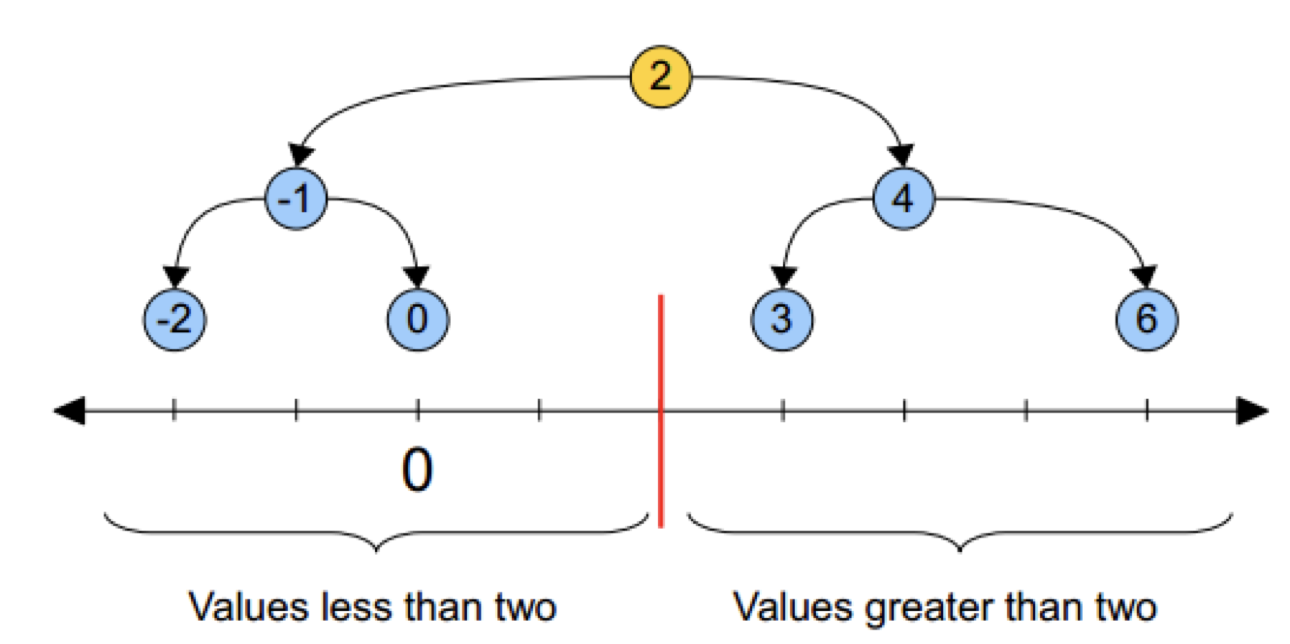
KD树类似这个思路,黄色的点作为根节点,上面的点归左子树,下面的点归右子树,接下来再不断地划分,分割的那条线叫做分割超平面(splitting hyperplane),在一维中是一个点,二维中是线,三维的是面。

黄色节点就是Root节点,下一层是红色,再下一层是绿色,再下一层是蓝色。
在一组数据中,根据距离,尽可能将点数平均的划分为多个区域。
# 1. 树的建立
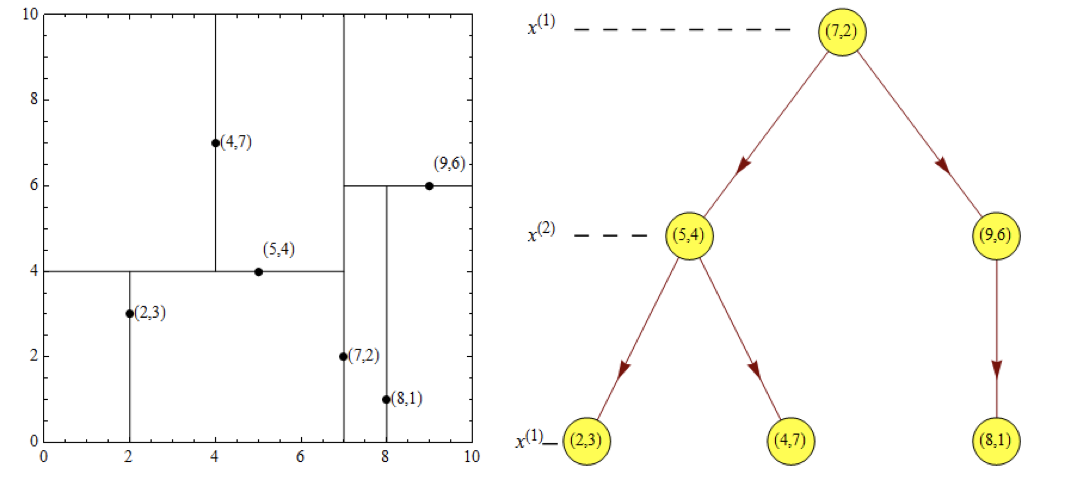
给定一个二维空间数据集:T={(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)},构造一个平衡kd树。
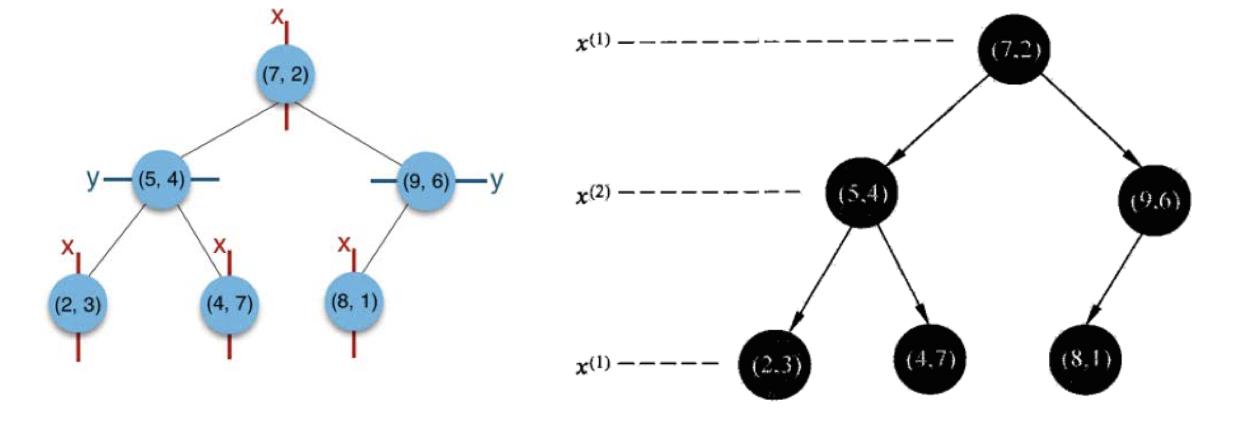
根结点对应包含数据集T的矩形,选择x(1)轴,6个数据点的x(1)坐标中位数是6,这里选最接近的(7,2)点,以平面x(1)=7将空间分为左、右两个子矩形(子结点);接着左矩形以x(2)=4分为两个子矩形(左矩形中{(2,3),(5,4),(4,7)}点的x(2)坐标中位数正好为4),右矩形以x(2)=6分为两个子矩形,如此递归,最后得到如下图所示的特征空间划分和kd树。
# 2. 近邻搜索
假设标记为星星的点是 test point, 绿色的点是找到的近似点,在回溯过程中,需要用到一个队列,存储需要回溯的点,在判断其他子节点空间中是否有可能有距离查询点更近的数据点时,做法是以查询点为圆心,以当前的最近距离为半径画圆,这个圆称为候选超球(candidate hypersphere),如果圆与回溯点的轴相交,则需要将轴另一边的节点都放到回溯队列里面来。
样本集{(2,3),(5,4), (9,6), (4,7), (8,1), (7,2)}
1. 查找点(2.1,3.1)
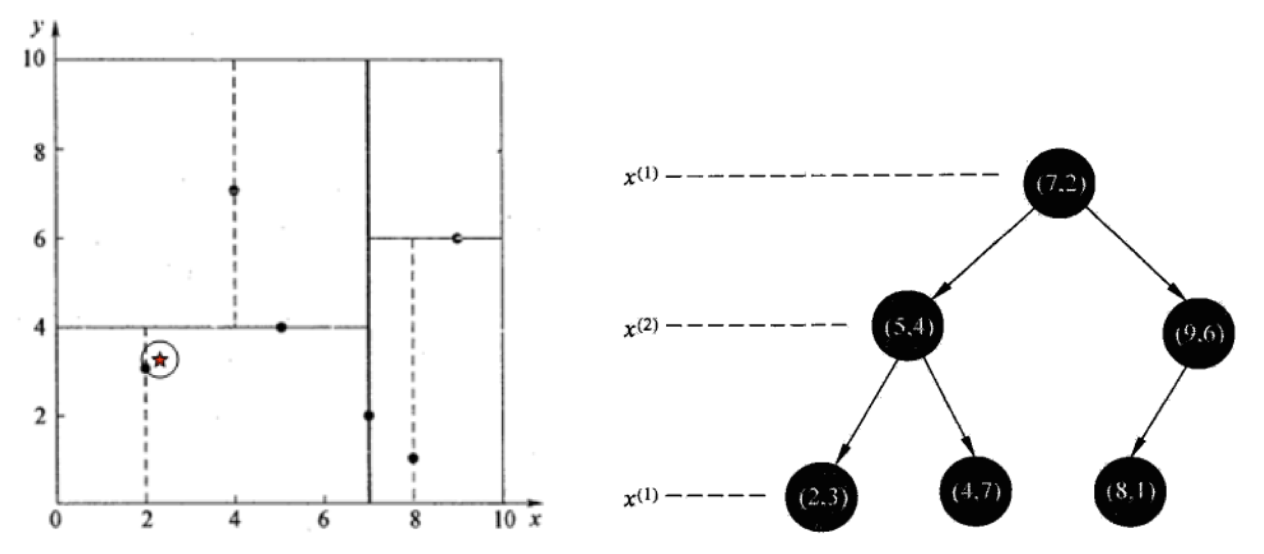
在(7,2)点测试到达(5,4),在(5,4)点测试到达(2,3),然后search_path(搜索路径)的结点为 <(7,2),(5,4), (2,3)>,从search_path(搜索路径)中取出(2,3)作为当前最佳结点nearest, dist(计算欧式距离)为0.141;
然后回溯至(5,4),以(2.1,3.1)为圆心,以dist=0.141为半径画一个圆,发现并不和超平面y=4相交,如上图,所以不必跳到结点(5,4)的右子空间去搜索,减少区域范围,因为右子空间中不可能有更近样本点了。
于是再回溯至(7,2),同理,以(2.1,3.1)为圆心,以dist=0.141为半径画一个圆,发现并不和超平面x=7相交,所以也不用跳到结点(7,2)的右子空间去搜索。
至此,search_path为空,结束整个搜索,返回nearest(2,3)作为(2.1,3.1)的最近邻点,最近距离为0.141。
2. 查找点(2,4.5)
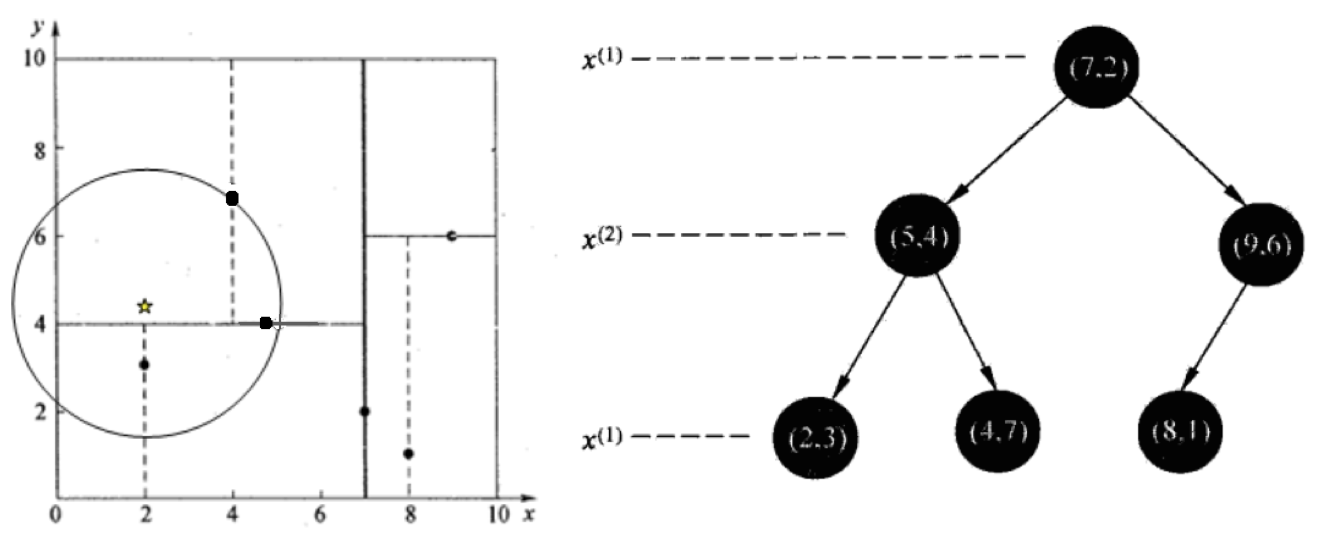
在(7,2)处测试到达(5,4),在(5,4)处测试到达(4,7)【优先选择在本域搜索】,然后search_path中的结点为<(7,2),(5,4), (4,7)>,从search_path中取出(4,7)作为当前最佳结点nearest, dist为3.202;
然后回溯至(5,4),以(2,4.5)为圆心,以dist=3.202为半径画一个圆与超平面y=4相交,所以需要跳到(5,4)的左子空间去搜索。所以要将(2,3)加入到search_path中,现在search_path中的结点为<(7,2),(2, 3)>;另外,(5,4)与(2,4.5)的距离为3.04 < dist = 3.202,所以将(5,4)赋给nearest,并且dist=3.04。
回溯至(2,3),因为(2,3)是叶子节点,所以直接判断(2,3)是否离(2,4.5)更近,计算得到距离为1.5,所以nearest更新为(2,3),dist更新为(1.5)
回溯至(7,2),同理,以(2,4.5)为圆心,以dist=1.5为半径画一个圆并不和超平面x=7相交, 所以不用跳到结点(7,2)的右子空间去搜索。
至此,search_path为空,结束整个搜索,返回nearest(2,3)作为(2,4.5)的最近邻点,最近距离为1.5。
3. 找k个值
案例流程讲述寻找一个点的过程,但KNN要求找出k个最近邻点,为了实现这个要求,我们需要维护一个大根堆
当出现一个距离更近的样本时,如果大根堆中的节点数量还不足k个,则增加一个节点并排序,如果大根堆已经有k个节点,则对比该样本的距离与大根堆中的根节点的距离,如果大于根节点距离,则不改变大根堆,如果小于该距离,则替换后再进行一次排序,顺着链路比较距离重复此操作。简单来说就是替换最大值。
有一棵 KD 树包含 6 个点 A(2, 3)、B(5, 4)、C(9, 6)、D(4,7)、E(8, 1)、F(7, 2),需要查询离 p(6, 6) 最近的两个点。
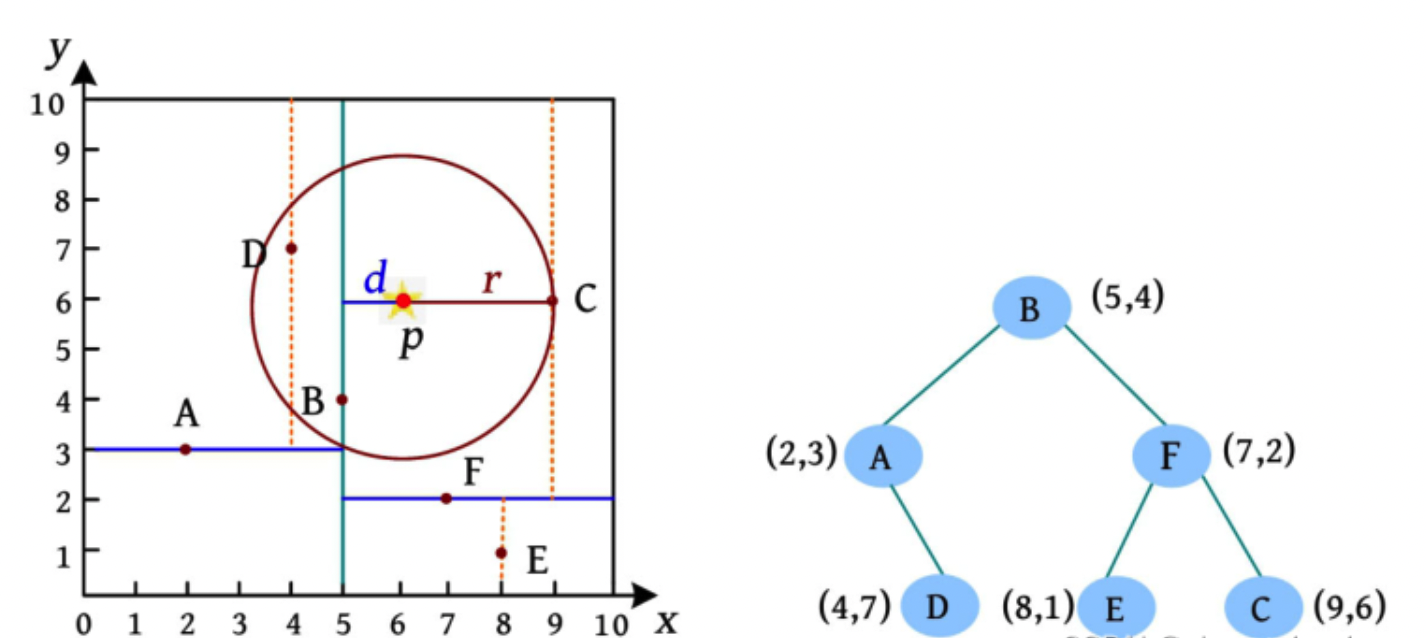
查询过程如下:
- 当前维度为 x ,p 的 x 坐标大于树根 B,在B的右子树中查询。
- 当前维度为 y ,p 的 y 坐标大于树根 F,在 F 的右子树中查询。
- 当前维度为 x ,p 的 x 坐标小于树根 C,在 C 的左子树中查询。
- C 的左子树为空,优先队列元素个数小于2,C 入队。
- C 的右子树为空,返回到 F,优先队列的元素个数小于2,F 入队,搜索 F 的左子树。
- F的左子树 E 到 p 的距离比队列中的最远点大,无须入队。
- 返回到 B,B 到 p 的距离比队列中的最远点小,F 出队,B入队。
- 以 p 为球心 且 p 到队列中最远点的距离为半径的超球体与划分点 B 的另一区域有交集(d<r),B 左侧区域的点有可能离 p 更近,需要继续查询 B 的另一区域(左子树)。
- 在 B 的左子树中,D 到 p 的距离比队列中的最远点小,C 出队,D 入队。
- 距离 p 点最近的两个点为 D、B。
由此可见,kd树检索效率比线性扫描快很多,但kd树有一些缺陷,比如当特征数量很多,即维度很大时,其搜索的效率其实是严重下降的,因此就诞生了更高级的球树搜索。
一般的在特征向量维度小于20的时候是可以用KD-Tree的,但是更高维度的时候建议使用Ball-Tree,这种算法的效率更高
# 3.1.7 球树(Ball Tree)
# 1. 什么是球树
球树的结构与kd树类似,同样是一个二叉树
# 2. 球树的原理
# 1. 球树的建立
根节点选择方式如下: 找到一个中心点,使所有样本点到这个中心点的距离最短。
对于每一个节点的子节点的选择,方式如下:
- 选择当前超球体区域离中心最远的点作为左子节点
- 选择距离左子节点距离最远的点作为右子节点
- 对于其他的样本点,计算到左子节点和右子节点对应样本点的欧式距离,并分配到距离较近的那一个
- 对所有子节点做相同的操作
- 到达设定的阈值r<=2(假设值),停止球体分割
球树的每个节点中,需要包含的信息如下:
- 该节点包含的样本点的信息
- 该节点超球体的圆心坐标
- 该节点超球体的半径
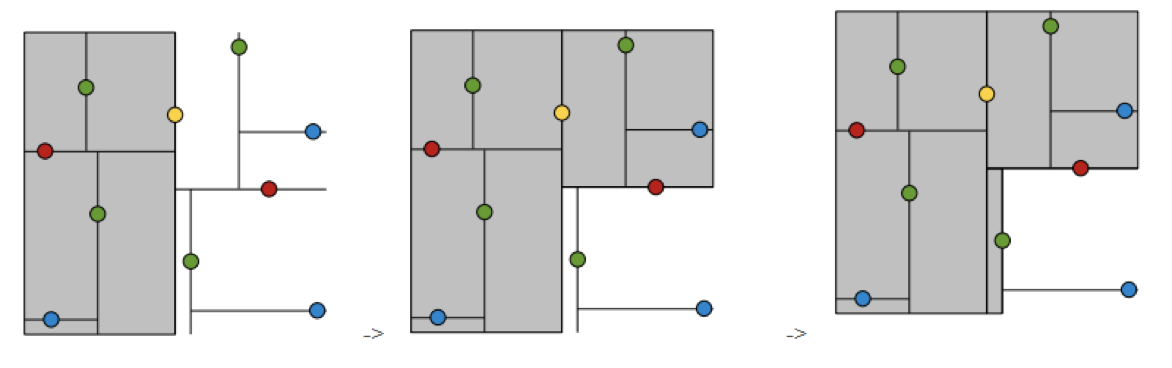
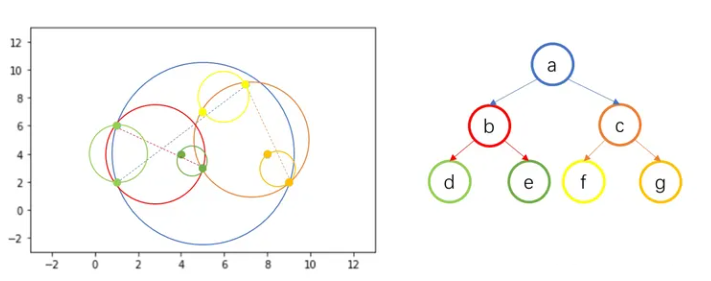
# 2. 球树搜索
球树搜索和kd树类似,球数多了查找范围R,最近邻点需要在测试样本点周围半径为 R 的超球体内,在下图中就是黑色的超球体。
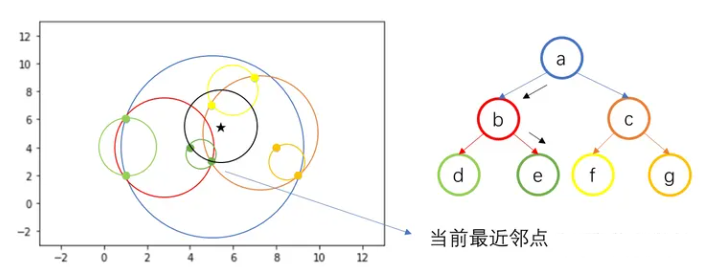
测试样本点与超球体 b 相交,则向下访问节点 b,继续往下搜索,发现与超球体 d 不相交,则搜索另一分支,与超球体 e 相交,则向下访问至 e。
因 e 中存在两个训练样本点,计算两个样本点与 Z 之间的距离,得到当前最近邻点(5, 3)。
接着回退父节点 b,不同于 kd 树,因为所有训练样本点都包含在叶节点中,即子节点包含的训练样本点为它们的父节点包含训练样本点的子集,因此回退到父节点后没有需要计算距离的样本,因此继续回退到根节点 a。
回退到根节点 a 后,搜索另一个分支 c,由于与 c 相交,因此向下访问 c,继续搜索,与 f 相交,向下访问 f,计算叶节点 f 中包含的训练样本点与测试样本点之间的距离,更新当前最近邻点为(5, 7)。
叶节点 f 搜索完毕,回退父节点 c,搜索另一分支 g,发现不相交,回退到根节点 a,所有分支搜索完毕,得到最近邻点(5, 7)。
# 3.1.8 KNN算法优缺点
优点:
- 简单有效
- 重新训练的代价低
- 适合类域交叉样本
- KNN方法主要靠周围有限的邻近的样本,而不是靠判别类域的方法来确定所属类别的,因此对于类域的交叉或重叠较多的待分样本集来说,KNN方法较其他方法更为适合。
- 适合大样本自动分类
- 该算法比较适用于样本容量比较大的类域的自动分类,而那些样本容量较小的类域采用这种算法比较容易产生误分。
缺点
- 惰性学习
- KNN算法是懒散学习方法(lazy learning,基本上不学习),一些积极学习的算法要快很多
- 类别评分不是规格化
- 不像一些通过概率评分的分类
- 输出可解释性不强
- 例如决策树的输出可解释性就较强
- 对不均衡的样本不擅长
- 当样本不平衡时,如一个类的样本容量很大,而其他类样本容量很小时,有可能导致当输入一个新样本时,该样本的K个邻居中大容量类的样本占多数。该算法只计算“最近的”邻居样本,某一类的样本数量很大,那么或者这类样本并不接近目标样本,或者这类样本很靠近目标样本。无论怎样,数量并不能影响运行结果。可以采用权值的方法(和该样本距离小的邻居权值大)来改进。
- 计算量较大
- 目前常用的解决方法是事先对已知样本点进行剪辑,事先去除对分类作用不大的样本。
- 惰性学习